Équation d'un plan et calcul vectoriel dans l'espace
En mathématiques appliquées à l'économie, la 3D existe depuis bien plus longtemps que dans nos téléviseurs. Mais il faut connaître quelques rudiments pour l'appréhender. Une représentation graphique dans l’espace peut être celle d’une fonction à deux variables, c’est-à-dire une surface courbe qui représente la relation existant entre une grandeur et deux autres (par exemple une quantité produite qui est fonction d’une quantité de travail humain et d’une durée de temps-machine). Dans l'espace, la surface la plus simple est plane. En économie, elle peut représenter une « contrainte », par exemple un niveau de production qui ne peut être dépassé.
Des vecteurs en 3D
D’abord, quelques notions de calcul vectoriel dans un espace à trois dimensions.
Les coordonnées d’un vecteur dans l'espace sont uniques et, à partir de deux points, elles sont obtenues par la même méthode que dans le plan.
Deux vecteurs sont colinéaires si les coordonnées de l’un sont un multiple des coordonnées de l’autre et trois vecteurs sont coplanaires si les coordonnées de l’un sont une combinaison linéaire des coordonnées des deux autres. À titre d’exemple, les vecteurs \(\overrightarrow{u} (1\,;2\,;4),\) \(\overrightarrow{v} (3\,;5\,; -1)\) et \(\overrightarrow{w}(5\,;9\,;7)\) sont coplanaires puisque \(\overrightarrow{w} = 2 \overrightarrow{u} + \overrightarrow{v}.\)
L'application des formules pour obtenir le milieu d'un segment (voir l'exercice de géométrie au bac) ou une distance entre deux points dans le plan se transpose aussi sans difficulté dans l'espace. L’orthogonalité se démontre dans le champ de la géométrie pure (voir les droites) ou à l’aide des coordonnées des vecteurs : soit \(\overrightarrow{u}(x\,; y\,; z)\) et \(\overrightarrow{v}(x’\,; y’\,; z’),\) les vecteurs \(\overrightarrow{u}\) et \(\overrightarrow{v}\) sont orthogonaux si \(xx’ + yy’ + zz’ = 0.\)
Le plan
Dans un espace à deux dimensions muni d'un repère, une droite non parallèle à l'axe des ordonnées illustre une fonction affine (voire linéaire ou constante). L’expression de celle-ci peut prendre la forme d’une équation cartésienne : \(ax + by + c\) \(=\) \(0.\) Dans un espace à trois dimensions muni d'un repère sur trois axes gradués (abscisses, ordonnées et cotes), les représentations graphiques ne sont pas toujours simples. Celle des points, par exemple, nécessite l’indication des traits de construction pour ne pas laisser l’impression d’un ciel étoilé où l’on ignore si telle étoile est plus ou moins éloignée du regard que telle autre. Le plan a pour équation \(ax + by + cz + d\) \(=\) \(0\) et sa représentation se limite souvent à un triangle (sauf s’il est parallèle à l’un des trois axes). Les trois points du triangle sont ceux du plan qui sont « traversés » par les axes. Une inégalité, large ou stricte, de type \(ax + by + cz + d\) \(\geqslant\) \(0\) définit un demi-plan.
Un plan dans l’espace est engendré par deux vecteurs directeurs. Les notions de calcul vectoriel rappelées ci-dessus sont donc applicables aux plans dont on connaît les équations.
Deux plans sont soit parallèles soit sécants. Ils sont parallèles si pour \(\lambda \in \mathbb{R}^*\) on a \(a = λa’,\) \(b = λb’\) et \(c = λc’\) (on retrouve la démonstration de colinéarité entre vecteurs). Si l’équation du plan ne comprend que deux coordonnées, celui-ci est parallèle à l’axe de la coordonnée manquante (idem qu’en deux dimensions où une droite d’équation \(y = a\) est parallèle à l’axe des abscisses et \(x = a\) est parallèle à l’axe des ordonnées).
Dans le cadre d’un repère orthonormé, deux plans sont perpendiculaires si \(aa’ + bb’ + cc’\) \(=\) \(0.\) On appelle vecteur normal à un plan un vecteur qui est orthogonal à ce plan. Si l’équation du plan est \(ax + by + cz + d\) \(=\) \(0\) le vecteur de coordonnées \((a\,;b\,;c)\) est normal à ce plan.
Exercice commenté
Cet exercice est un extrait de l’épreuve du bac ES de septembre 2009 (France métropolitaine) pour les élèves qui avaient choisi la spécialisation maths.
-
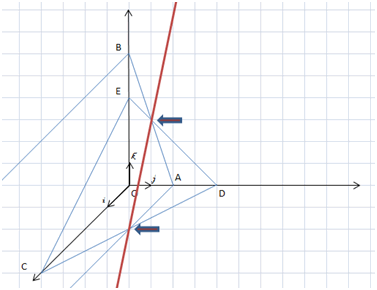
L’espace est muni d’un repère orthonormal \((O\,;\overrightarrow i ,\overrightarrow j ,\overrightarrow k ).\) Sur le dessin joint en annexe, on a placé les points \(A(0\,; 2\,; 0),\) \(B(0\,; 0\,; 6),\) \(C(4\,; 0\,; 0),\) \(D(0\,; 4\,; 0)\) et \(E(0\,; 0\,; 4).\) Soit \((P)\) le plan d’équation \(3y + z = 6.\) Il est représenté par ses traces sur les plans de base sur le dessin joint en annexe.
1.a)Démontrer que les points \(C,\) \(D\) et \(E\) déterminent un plan que l’on notera \((CDE)\)
b)Vérifier que le plan \((CDE)\) a pour équation \(x + y + z = 4.\)
Il faut montrer que deux des trois vecteurs qui « relient » les points ne sont pas colinéaires. Prenons \(\overrightarrow{CD}\) et \(\overrightarrow{DE}.\) Le premier a pour coordonnées \((-4\,; 4\,; 0)\) et le second \((0\,; -4 \,;4).\) Il est évident qu’aucun scalaire ne peut en multiplier un pour obtenir l’autre. La vérification de l’équation du plan est simple puisqu’il suffit de constater que chacun des trois points vérifie l’équation. Par exemple, pour \(C,\) nous avons \(4 + 0 + 0 = 4.\)
- 2.a) Justifier que les plans \((P)\) et \((CDE)\) sont sécants. On note \((Δ)\) leur intersection.
b) Sans justifier, représenter \((Δ)\) en couleur sur la figure en annexe.
Pour justifier que deux plans sont sécants, il faut démontrer qu’ils ne sont pas parallèles et pour cela montrer que deux vecteurs normaux à ces plans ne sont pas colinéaires. Les coordonnées de ces derniers sont \((0\,; 3\,; 1)\) pour \((P)\) et \((1\,; 1\,; 1)\) pour \((CDE).\) Il est là aussi évident qu’il n’existe aucune proportionnalité. Donc, \((P)\) et \((CDE)\) sont sécants. Certes, mais où ? Il faut trouver deux points par lesquels passe la droite. Il suffit de regarder la figure pour constater que les points de coordonnées \((0\, ; 1\,;3)\) et \((2\,; 2\,; 0)\) conviennent. Ci-dessous, les constructions sont celles qui figurent dans l’énoncé, la droite \((Δ)\) est en rouge et les deux points qui ont permis sa construction sont indiqués par des flèches.
-
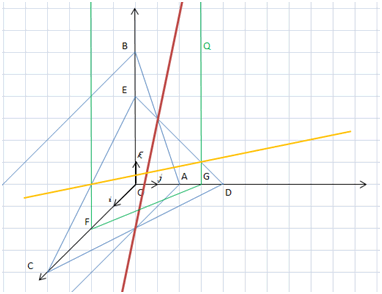
3) On considère les points \(F(2\,; 0\,; 0)\) et \(G(0\,; 3\,; 0).\) On note \((Q)\) le plan parallèle à l’axe \((O\,; \overrightarrow{k})\) et contenant les points \(F\) et \(G.\)
a) Placer sur la figure les points \(F\) et \(G.\) Sans justifier, représenter le plan \((Q)\) par ses traces sur les plans de base (…).
b) Déterminer les réels \(a\) et \(b\) tels que \(ax + by = 6\) soit une équation du plan \((Q).\)
Pour la question a), voir plus bas les traits verts. La b) n’a rien de compliqué. \(F\) et \(G\) doivent vérifier l’équation de \((Q).\) Les points \(F\) et \(G\) permettent respectivement de déterminer \(a = 3\) et \(b = 2.\) Donc, l'équation de \((Q)\) est \(3x + 2y = 6.\)
- 4) l’intersection des plans \((CDE)\) et \(Q\) est la droite \((Δ’).\) Sans justifier, représenter \((Δ’)\) (…).
Il ne s’agit là que d’une opération graphique. On remarque que les points de coordonnées \((0\,; 3\, ; 1)\) et \((2\, ; 0\, ; 2)\) font partie de cette intersection. Il suffit de les relier (en orange).
- 5) On considère le système de trois équations à trois inconnues suivant :
\[\left\{ {\begin{array}{*{20}{c}}
{3y + z = 6}\\
{x + y + z = 4}\\
{3x + 2y = 6}
\end{array}} \right.\]
Résoudre ce système. Que peut-on alors en déduire pour les droites \((Δ)\) et \((Δ’)\) ?
La résolution du système conduit à \(x = 1\) et \(y = z = 1,5.\) Comme ces équations sont celles de nos trois plans et qu’il n’existe qu’une solution, cela signifie que les plans se croisent en un point. Et comme les deux droites correspondent à deux intersections de plans, le point de coordonnées \((1\, ; 1,5\, ; 1,5)\) est celui ou \((Δ)\) et \((Δ’)\) se croisent.
